濟南尚藝數(shù)控科技有限公司
做專業(yè)的機器人集成商

作者:濟南華天隆數(shù)控設備廠家 發(fā)布時間:2018-11-13 19:36:50 瀏覽次數(shù):0
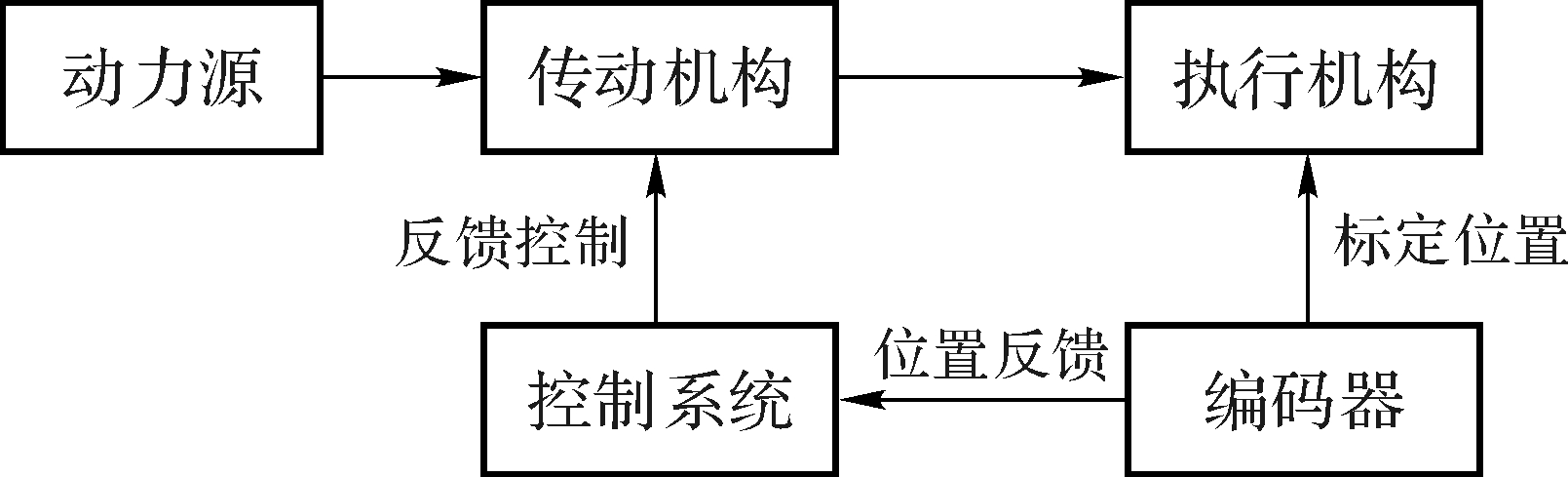
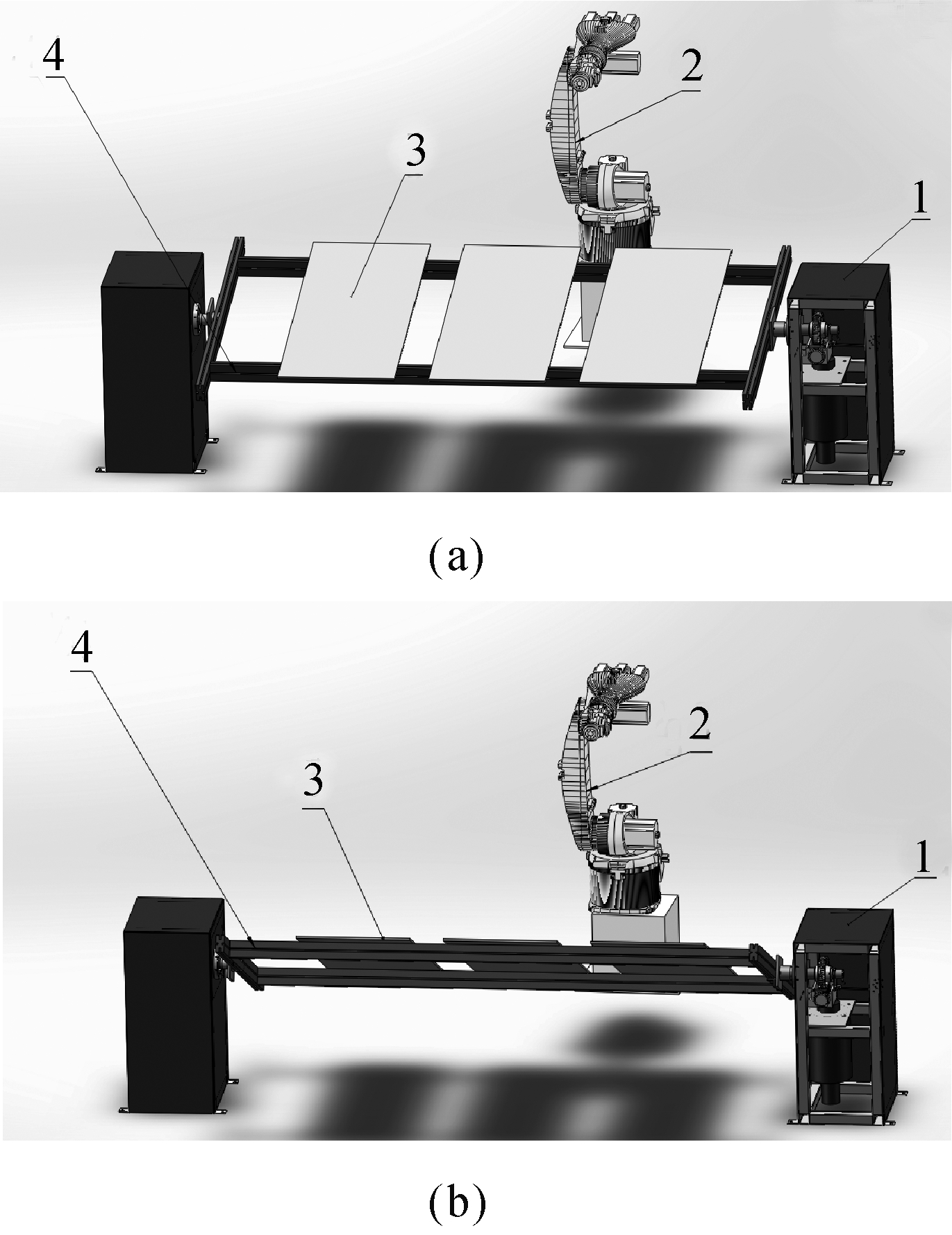
針對目前各類焊接變位裝備的現(xiàn)狀,,結合家具,、五金制品等產品的焊接工藝要求,設計了一套翻轉式的焊接工作臺,。該工作臺利用氣動馬達作動力輸出,,蝸輪蝸桿大傳動比傳動系統(tǒng)作高精度分度裝置,光電編碼器作位置信息獲取裝置,,通過閉環(huán)控制實現(xiàn)高精度翻轉運動,,其系統(tǒng)組成如圖1所示。濟南焊接機器人的翻轉工作臺三維示意圖如圖2所示,,用戶將需要焊接的工件放在由標準鋁型材搭建的焊接平臺上,,進行無縫焊接,通過焊接夾具將用戶工件定位并固定在焊接平臺上,,而后機器人開始焊接作業(yè),,圖2(a)為焊接機器人在某工位作業(yè)。當某個焊接工藝完成,,需要變換用戶工件時,,翻轉式工作臺產生翻轉動作,改變一定角度以便符合良好的焊接工藝要求,圖2(b)是焊接機器人在另一焊接工位作業(yè)的示意圖,。
為了配合高性能工業(yè)機器人對工件的焊接,,設計的濟南焊接機器人的翻轉式焊接工作臺的角度定位誤差需控制在0.3°內,而且在惡劣環(huán)境下也可以穩(wěn)定可靠地運行,。本文參考相關案例,提出一種基于氣動馬達的位置控制解決方案,,設計出一套具有一定使用精度的翻轉式焊接工作臺,,該工作臺的主箱體結構如圖3所示。
如圖3所示,,該工作臺工作原理為:利用氣動馬達輸出動力,,摩擦輪傳動為減速,同時從動摩擦輪起離合作用,。當工作臺翻轉到預計角度時,,控制系統(tǒng)控制氣缸動作,活塞縮回,,從動摩擦輪與主動摩擦輪分離,,切斷動力;同時,,制動摩擦盤與從動摩擦輪接合,,迅速將其制動,蝸桿鎖死,,實現(xiàn)準確停車,。當翻轉工作臺需要反轉時,氣動馬達反轉,,控制系統(tǒng)控制氣缸動作,,活塞伸出,從動摩擦輪與制動摩擦盤分離,;同時,,從動摩擦輪與主動摩擦輪接觸,接通動力,,實現(xiàn)反轉,。該方案成本低,維護簡單,,操作容易,,而且具有一定的運動精度。如圖4所示,,氣動馬達啟動,,輸出動力,主動摩擦輪5旋轉。常態(tài)下,,從動摩擦輪4在壓緊彈簧6的作用下壓緊制動盤3,,蝸桿2處于抱死狀態(tài),同時由于采用了具有自鎖性能的蝸輪蝸桿傳動,,因此提高了蝸桿抱死性能的可靠性,。當翻轉工作臺需要翻轉時,控制氣缸伸出,,使從動摩擦輪滑環(huán)7向右滑動,,同時從動摩擦輪4在其作用下向右滑動,并以一定的壓緊力壓緊旋轉的主動摩擦輪5,,從而蝸桿2在摩擦輪的帶動下旋轉,,具有一定的輸出量,使焊接工作臺實現(xiàn)旋轉,。此外,,為讓蝸桿傳動具有自鎖性和提高系統(tǒng)的響應特性,該設計采用大傳動比的二級傳動方案,,總傳動比為112,。同時較大傳動比能降低氣動馬達的精度對輸出轉角的影響,可提高系統(tǒng)位置精度,。
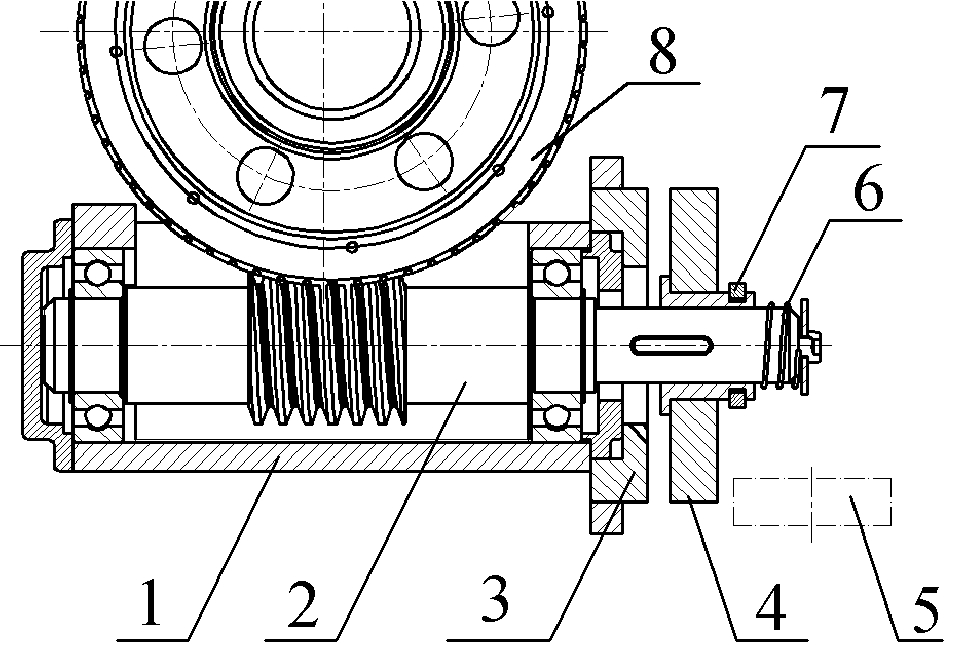
翻轉工作臺的控制系統(tǒng)實時從光電編碼器處獲得相應的轉角位移數(shù)據(jù),,并與目標量作比較,當其差值在允許誤差范圍內,,即在濟南焊接機器人的焊接工作臺旋轉到位的狀態(tài)下,,系統(tǒng)驅動從動摩擦輪滑環(huán)7,使其向左滑動,,同時從動摩擦輪4在驅動力和原彈簧壓縮力的作用下迅速壓緊制動盤3,,實現(xiàn)動力切斷和停車抱死的功能,從而可以準確實現(xiàn)位置控制,。此時,,氣動馬達在工業(yè)機器人焊接作業(yè)期間停車,準備下一次正轉或反轉運行,。同時,,為了減少制動時蝸桿的響應時間,提高控制精度,,蝸桿2和從動摩擦輪4的轉動慣量應盡量?。挥捎谖佪單仐U傳動選擇開式傳動,,所以在強度設計時一定要考慮周全,,避免引起安全性問題。
本系統(tǒng)采用總傳動比為112的傳動方案,根據(jù)旋轉運動規(guī)律,,負載端轉動慣量折算到輸入軸的轉動慣量粗略計算為=1.1×10-3kg·m2,,其中分子為翻轉平臺轉動慣量,分母為傳動比,。按照一般同功率伺服電機轉子慣量Jm=5.0×10-4kg·m2,,可得出負載等效慣量和轉子慣量的比值為2.2。根據(jù)慣量匹配原理,,當?shù)刃T量小于輸入軸轉子慣量的3~5倍時可視為慣量匹配[18],。同樣可以得出,該翻轉平臺角加速度=32 rad/s2,,其中T為系統(tǒng)額定輸出扭矩,J為翻轉平臺轉動慣量,。由此可得,,當以額定扭矩啟動時,運行至速度14 r/min,,只需要0.05s,。由粗略計算可知,本系統(tǒng)慣量匹配,,響應時間短,,能夠滿足快速濟南焊接機器人的啟停要求。
文章來源:http://caigod.cn/index.php?c=show&id=172,,轉載請注明出處,。濟南尚藝數(shù)控科技有限公司
統(tǒng)一咨詢電話:13589114995
189-5311-3720
官方網(wǎng)址:caigod.cn
聯(lián)系地址:山東省齊河經(jīng)濟開發(fā)區(qū)想能科技園
 掃描快速訪問手機網(wǎng)站
掃描快速訪問手機網(wǎng)站  掃描加微信
掃描加微信Copyright ? 2018-2021 濟南尚藝數(shù)控科技有限公司 版權所有 魯ICP備14026284號-3 技術支持:卓博科技
本網(wǎng)站部分內容來源于網(wǎng)絡,如有侵權請告知,!我們立即刪除,;本網(wǎng)站嚴格遵循國家相關法律法規(guī)規(guī)定,如有不當之處,,請告知,!我們立即刪除。


